
Absolute calibration
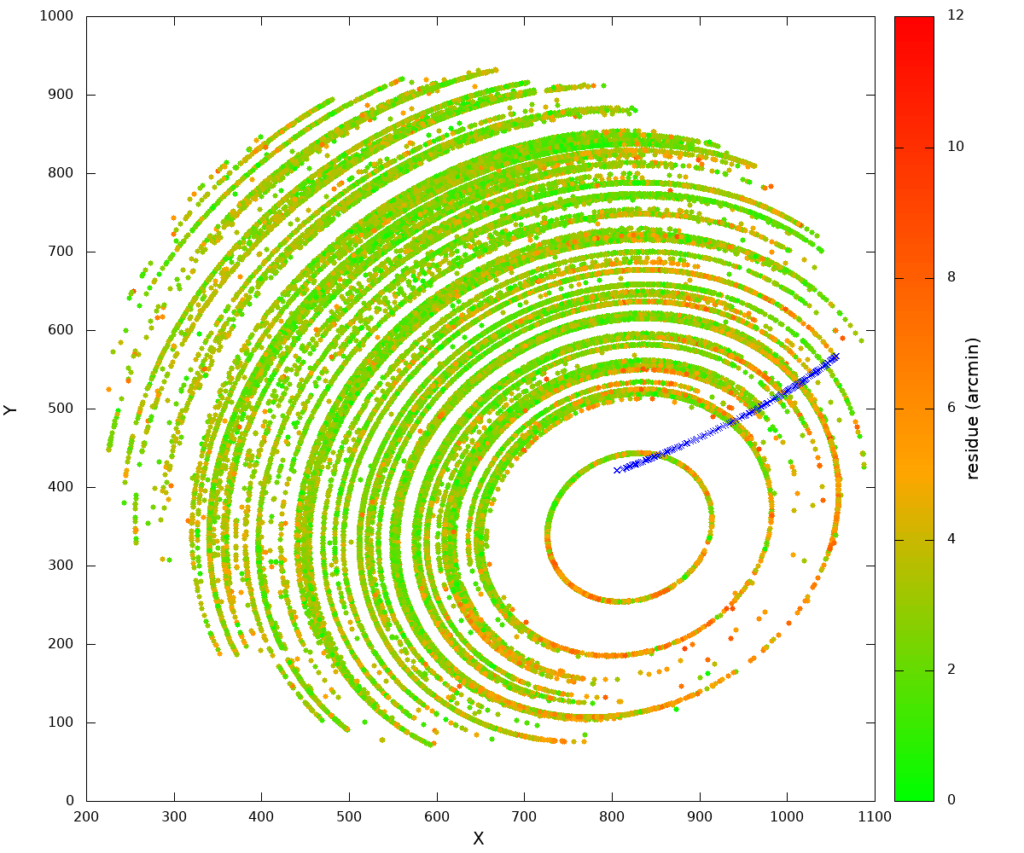
The raw CCD images are not pre-processed: no dark and flatfield corrections are performed. Absolute calibration is performed using standard stars measurements on 5 sec exposures (with stars of magnitude <= 4.5) acquired every ten minutes. We establish a correspondence between the observed stars and those present in the Hipparcos catalog (Bessell 2000). The astrometric reduction allows us to obtain an accuracy of one-tenth pixel or 1 arcmin.
Astrometric calibration
To mitigate the effect of cloudy nights and breakdowns, we compute an astrometric calibration once per month for each station. This calibration takes into account the orientation of the camera and the geometric distortion of the optical lens. It leads to an astrometric solution for objects above 10 degrees of elevation with an accuracy of 1 arcmin. This works for most cameras as their mounts are rigid. However, we occasionally detected flexible mounts based on the repeated calibrations, which led us to shorten the masts of such stations. Photometry is at that time only usable for events with an absolute magnitude lower than −8 with an accuracy of 0.5 magnitude. The date of the frame is determined using the local PC time set by the Network Time Protocol (NTP), which has an accuracy of about 20 ms.
Processing steps of single detections
The processing steps followed by the FRIPON pipeline are the following:
- The detection strategy is described here
- If a meteor is detected, the centroid CCD coordinates of the short meteor trail are calculated on the fast rate (30 fps) images
- The monthly astrometric model is used to convert these coordinates into the azimuth and the elevation of the bolides in the J2000 reference frame.
- The absolute magnitude light curve of a meteor is calculated:
- determination of the flux of an equivalent magnitude 0 star at zenith and the linear extinction function of the air mass for one-month cumulative observation,
- measurement of the bolide flux on individual frames and conversion in magnitude, and
- conversion of the meteor magnitude into an absolute magnitude, defined as its magnitude at a standard distance of 100 km.
Orbit of the bolide
The trajectory is calculated in thwo steps:
1- We first use a time-independent geometrical model assuming that the trajectory observed by a single station follows a straight line (Ceplecha 1987). This method allows to separate the space and time components of our measurements to overcome the problem of NTP accuracy. A modified least-squares regression is used and leads to an internal error estimate for each camera (typically 0.75 arcmin, or 0.07 pixel on average). We then compute a global solution by minimizing the chi-square between the modeled and measured astrometric positions observed simultaneously by all the stations.
2-A deceleration model involving several parameters are unknown such as drag coefficient, object size, shape, density and strength is applied to retrieve the infinite velocity of the bolide and to derive its pre-entry orbital parameters. We use a simple physical model similar to that used by other teams (Lyytinen & Gritsevich 2016, Bouquet et al. 2014, Sansom et al. 2019b) to fit the bright flight data.
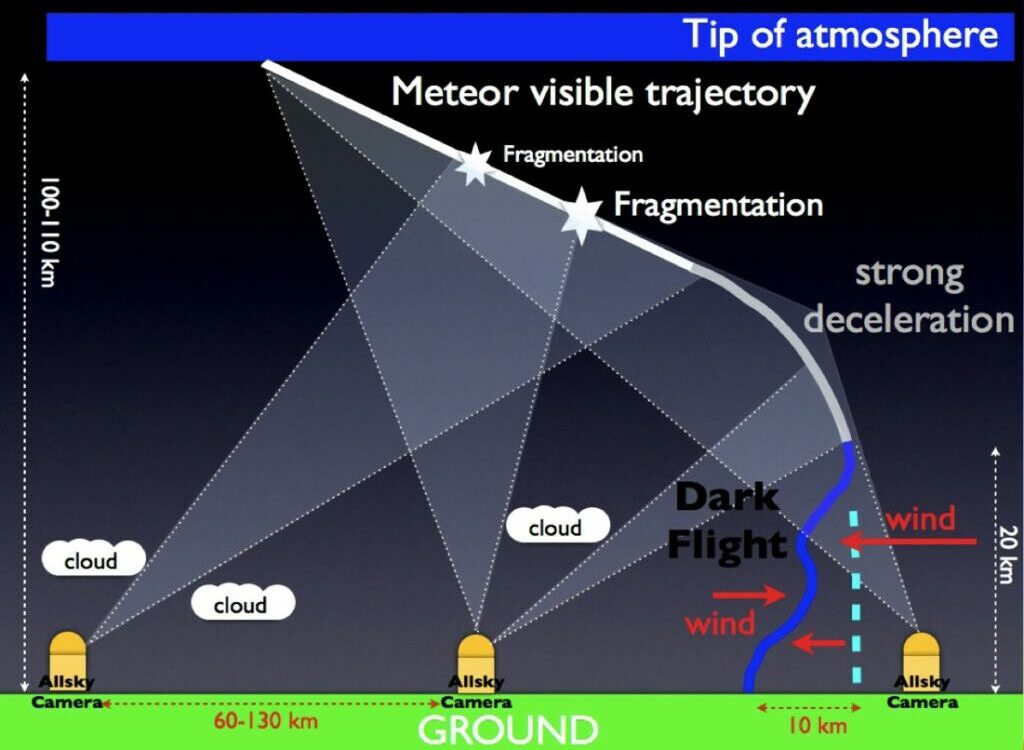
Dark flight
At the end of the bright flight, a meteoroid is subject only to aerodynamic drag (including winds) and gravity. It takes into account the wind velocity relative to the fragment, the gas density in the atmosphere and the Earth gravity. We use a local atmospheric model of wind retrieved from meteorological offices to determine the wind velocity. The end of the bright flight simulation gives us the initial conditions of the dark flight motion, namely the initial position, speed, and acceleration of the fragment.
Want to know more?
Jeanne et Al. 2020: Calibration of fish-eye lens and error estimation on fireball trajectories: application to the FRIPON network
Colas, F. et al, 2020, FRIPON: a worldwide network to track incoming meteoroids. Astronomy & Astrophysics, Volume 644
Jeanne, S 2020, Méthode d’analyse statistique appliquée au réseau d’observation européen des météores FRIPON. PhD thesis (FR)